WarDriving #3 - with MeshMapper
Third time is the charm!
I finally got smart. The effort to figure MeshCore coverage on Vashon in a consistent, reliable, automated way is enabled by the rapidly advancing MeshMapper project by MrAlders0n affiliated with the Ontario Radio CLub.
Previous techniques
As noted in my previous wardriving post, there was a nice early effort, documented by WA7JNJ at https://www.youtube.com/watch?v=NhpzdhJeT2w, and noted at www.PugetMesh.org, but that system has since started pointing folks to the worldwide MeshMapper system.
MeshMapper to the rescue
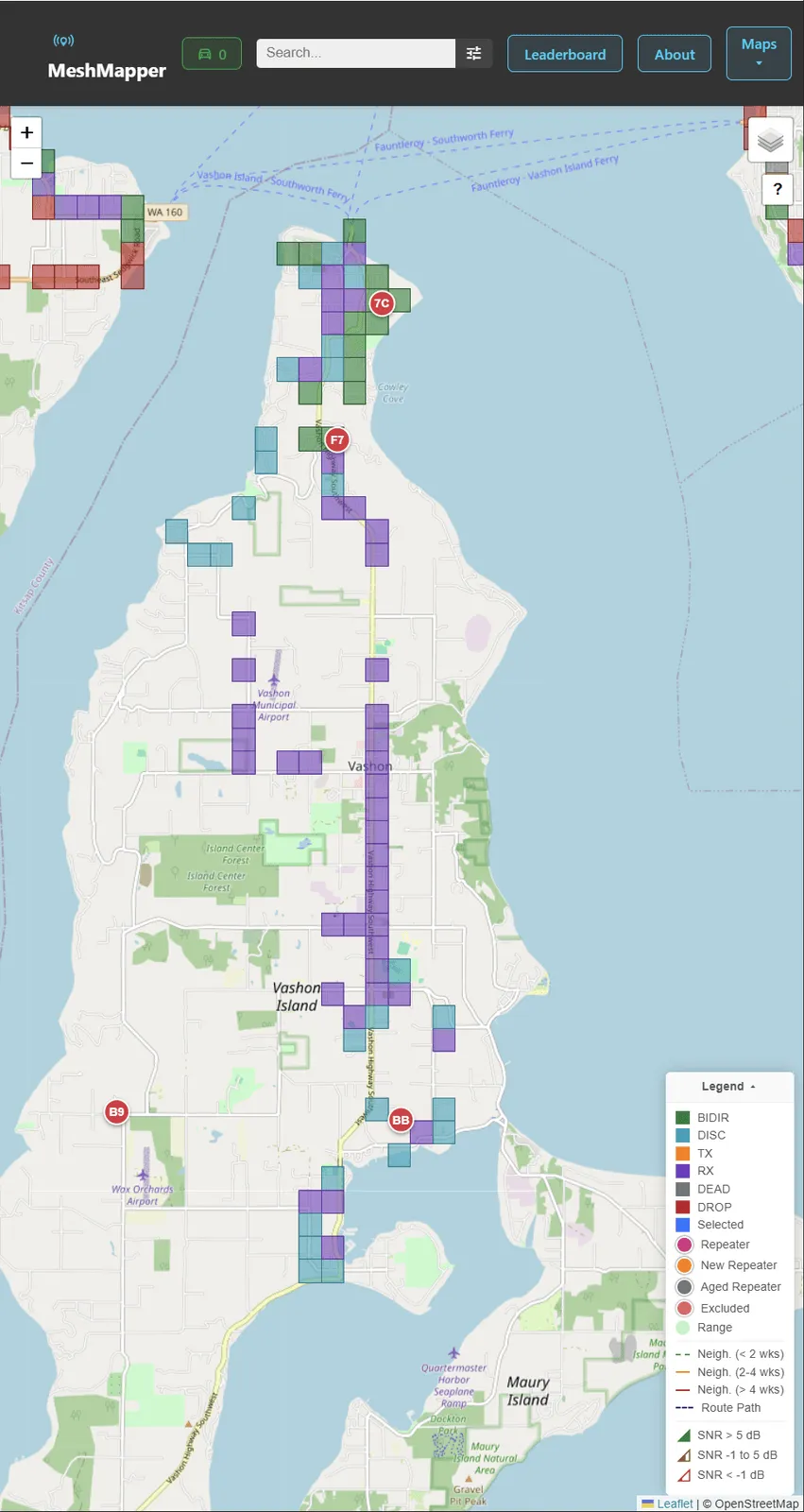
To try the new technology out, disconnect your device from the MeshCore app, freeing up the bluetooth connection, then connect your companion radio to the new MeshMapper app. Turn it on & start traveling! As you bike/drive/hike around, MeshMapper will send out periodic pings, and automatically send the results to the world-wide map. Zoom into Vashon and you can see the current status of our island network.
MeshMapper has a web client available through the browser, and newly a pair of Flutter Apps for iOS and Android. Version 1.0.1 was just yesterday!
MeshMapper has a new Discord Server if you need to ask technical issues. Report bugs and see the latest updates on the project’s GitHub pages &emdash; you’ll likely want to to focus on their MeshMapper-Project repository.
I found it highly satisfying to ‘document’ the current state of Vashon’s network - automatically. Be sure to enable sounds on the app. It generates fun, classic ping sound that matches one’s submarine sonar fantasies.
I’ll document more about how to set it up and what the options mean on our mapping page.
I tried setting things up using XIAO nRF52840 & Wio-SX1262, adding a GPS, but GPS’s typically use UART’s Rx/Tx interface, not I2C. The firmware only has 2 wires to work with apparently, so its either I2C (more useful) or UART. Details and also here In reality, it turns out the MeshMapper software uses the smartphone’s GPS & location, so the radio need not have a GPS after all.